Gazebo Robot Maze - Sonar (C++, Gazebo) (Figures in process)
Overview:
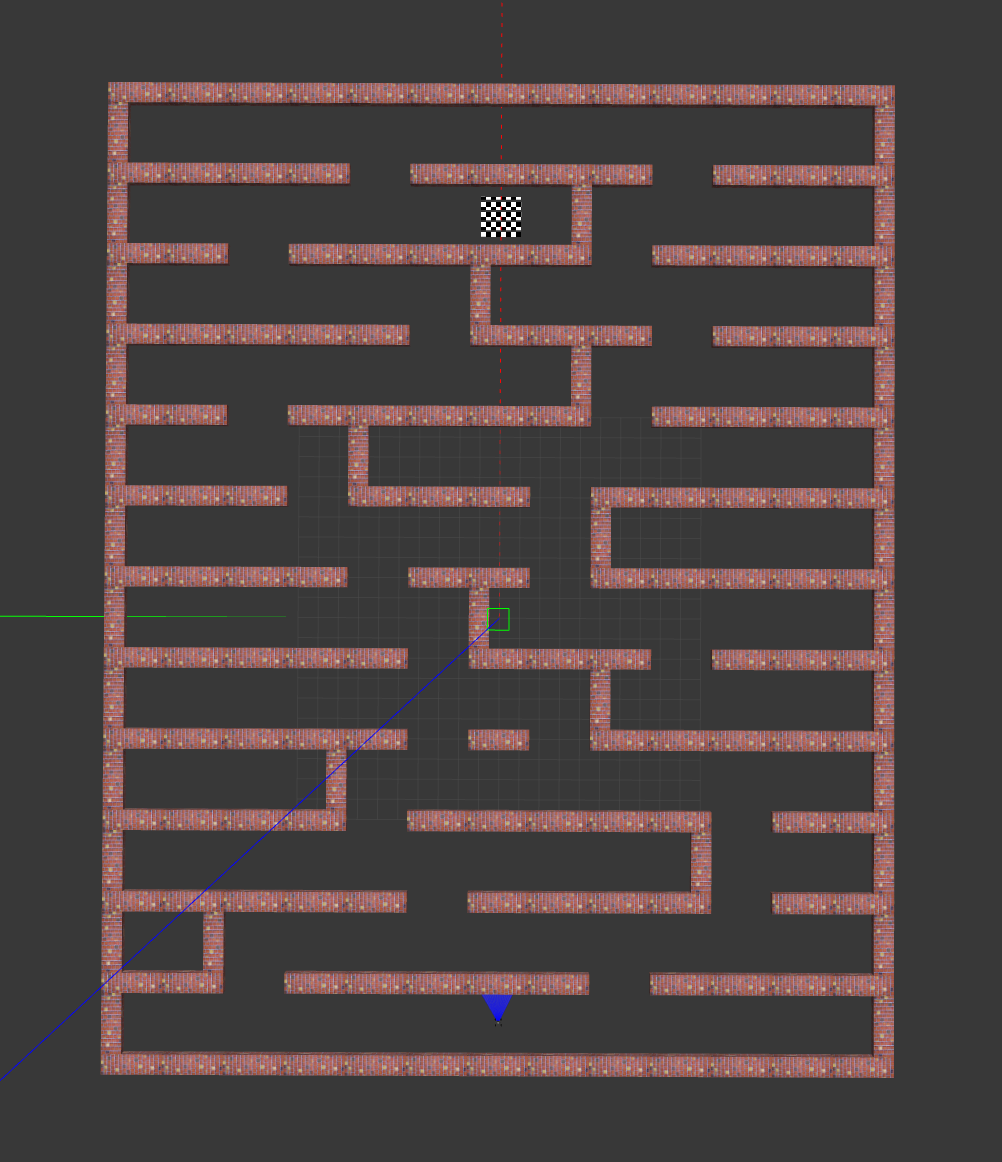
In this project, a Gazebo tank bot with a sonar sensor was used as the platform for a controller to guide the robot to the goal of a maze. The simulated sonar sensor has a angular range of about 30 degrees and a distance range of 2 meters and returns a distance value if an object is within this range.
Purpose:
- To independently design a robot controller algorithm (C++) that uses a basic range sensor to navigate to the goal of a maze.
- Implement designs in Gazebo.
Challenges:
- Range sensor has limited angular range and does not return angle of detection.
- Limited sensors required navigation algorithm to have different states in order to avoid cases where bot would get stuck.
Outcome:
- Implemented an algorithm to succesfully navigate to the goal of a maze with limited sensor data.
- Algorithm:
- Wall follow allows for navigation to next "doorway"
- When at a "doorway" and previous wall has been cleared (no object detected), bot turns towards goal
- When met with another obstacle, turn based on alternating turn variable (prevent bot from getting stuck)
- Continue wall follow on current obstacle
- Repeat until goal reached
Skills Learned:
- Implementation of custom algorithm with limited input
- Gazebo simulation