ArUco Navigation and Follow (C++, Python, Gazebo, OpenCV, ArUco) (Figures in process) Github Repository

Overview:
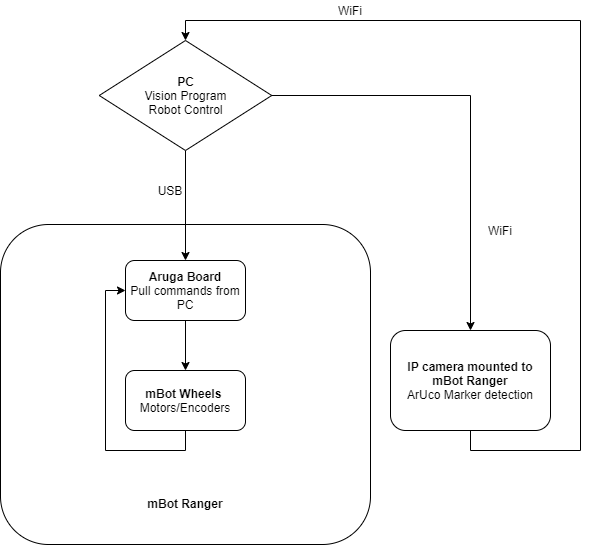
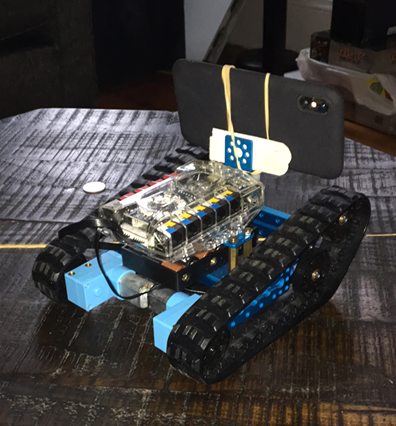
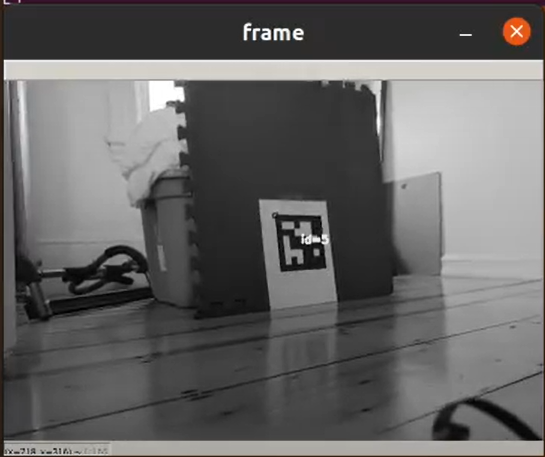
Worked with a team of 4 to design a system to navigate a map filled with ArUco Markers. Before physical implementation, the design was tested in Gazebo. The physical platform of the project was an mBot Ranger and the sensor used was an RGB camera (IP camera application running on a smartphone). The platform used the OpenCV and ArUco libraries to navigate the map and recognize the markers. The bot searches for the first marker (ordered by ArUco Marker ID) and navigate to it and repeat until all markers are visited. Some applications that this could serve is a robot navigating to a POI and fulfilling a task, then going on to the next. Such applications are found a lot in warehouse automation. The design can also serve as a marker follower and would be ideal for primary and secondary robot navigation.
Purpose:
- Collaborate with a team to produce an original solution to a problem.
- Design a system that can allow for navigation to points of interest that are within range.
Challenges:
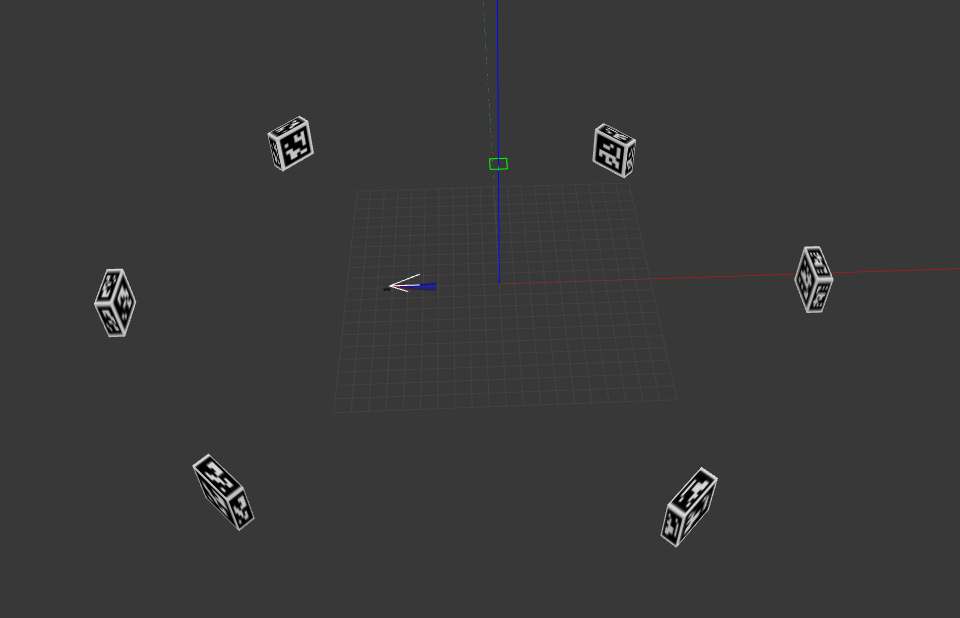
- Designing original Gazebo world with ArUco Markers in place
- Port code from simulation platform to physical mBot Ranger platform.
- Adjust design for physical implementation (sensor noise, mechanical issues, etc.)
Outcome:
- Used Gazebo to simulate and validate a control algorithm to implement physically. Created a design that allows for POIs (marked with ArUco tags)to be visited sequentially with a mobile robot equipped with an RGB camera.
- Navigation Algorithm:
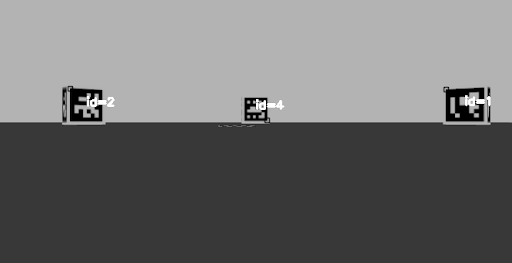
- Search for next ArUco (corresponding ID) by rotating
- Once found (match center of marker with center of input frame)
- Continue towards marker with periodic adjustments to trajectory if centers are misaligned outside of a threshold
- Repeat with next ArUco ID
- Follow Algorithm:
- Search for ArUco to follow (corresponding ID) by rotating
- Once found (match center of marker with center of input frame)
- Continue towards marker with periodic adjustments to trajectory if centers are misaligned outside of a threshold
- Stop if within a certain range of marker to avoid collision
Skills Learned and Personal Contributions:
- Simulation robot control program in C++
- Real world robot control program in Python
- Implementation and porting of simulation program to real world
- Simulation to real world implementation
- Gazebo simulation/world creation
- OpenCV and ArUco library implementation (C++ and Python)