Hospital Assistant Robots (ROS, Python) (Figures in process) Full IRCA Report
Overview:
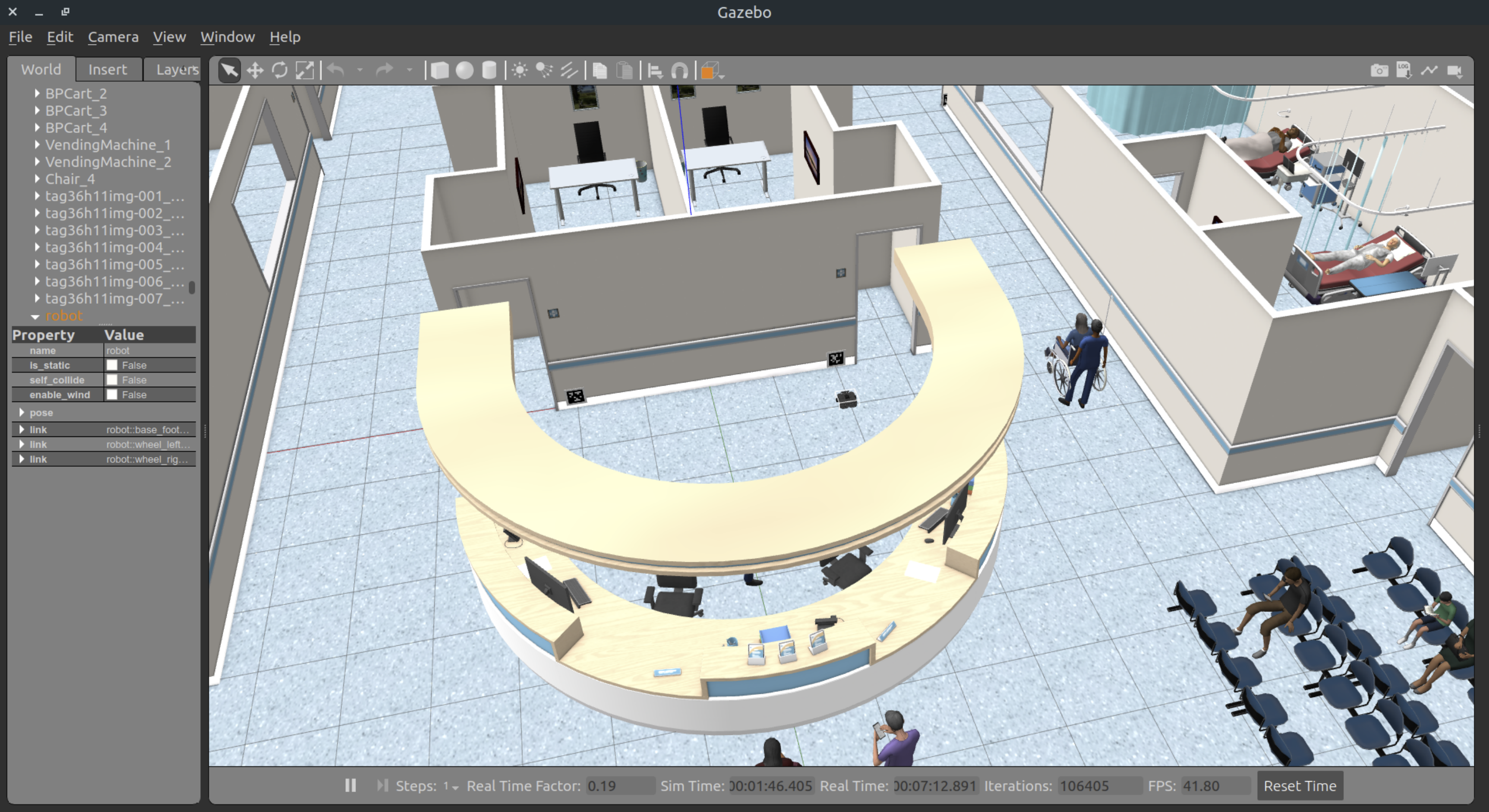
Worked with a team of 4 to create a solution that uses a primary robot (robot P) to guide a visiting robot (robot S) to POIs.
Robot P: Has access to an RGB-D camera and a Laser Scanner. It is also assumed that this robot can map the environment with the software it has on it. This robot cannot access the position of robot S or any other topic private to robot S. It can communicate with robot S only through a `/comm` topic, which is of type `std_msgs/String`.
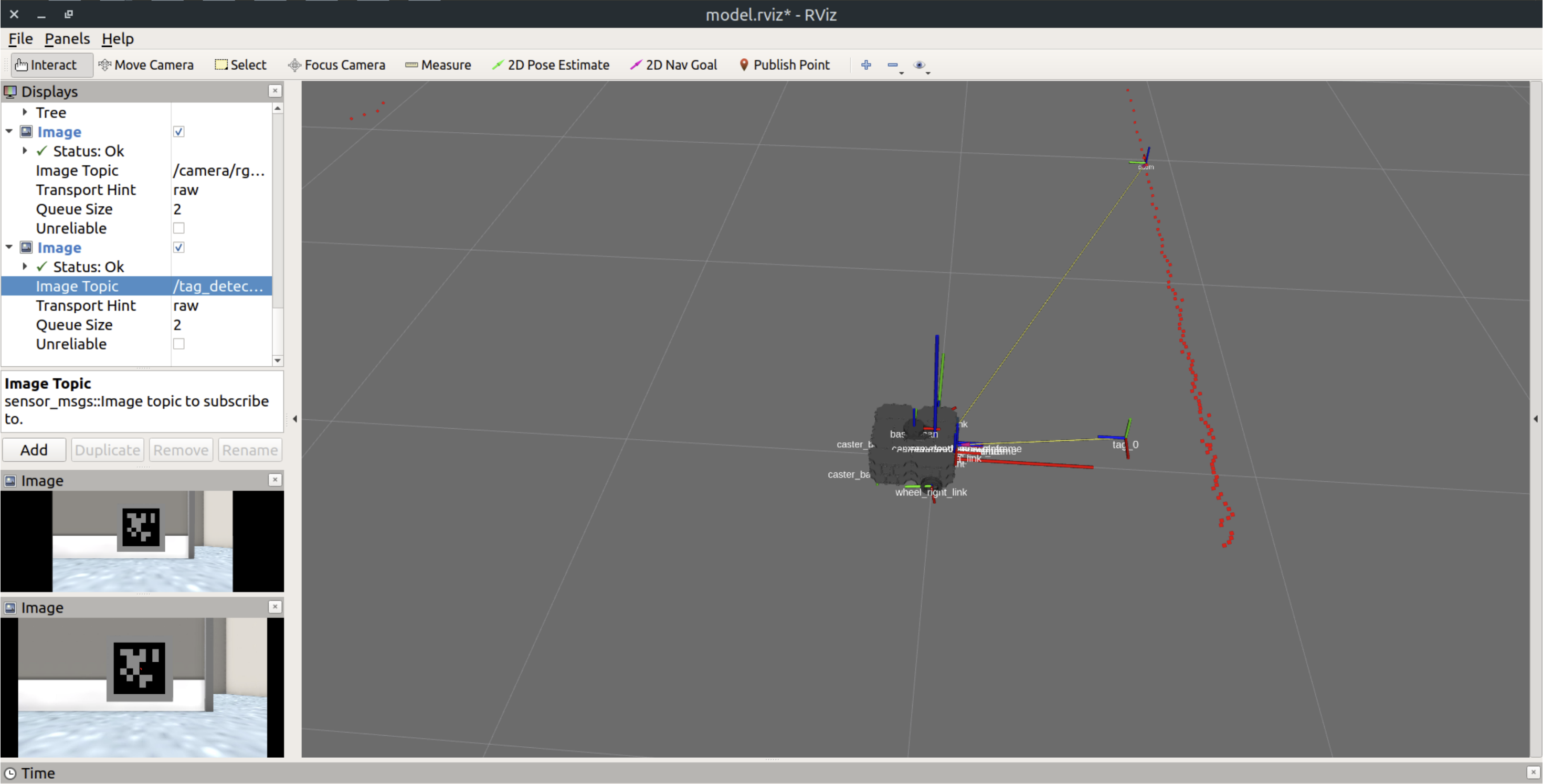
Robot S: We assume that this robot has access only to an RGB camera. This robot does not have a Laser Scanner and a software for SLAM or Localization. It does not know the map of the Hospital as well. Moreover, it cannot access the map information gained by robot P. It can communicate with robot P through a topic named `/comm` which is of type `std_msgs/String`. It can also access its own camera topic. This robot can access its other topics as well, like other nodes that may process the camera topic and publish processed information on new topics.
Challenges:
- Finding a method to have robot S follow robot M efficiently.
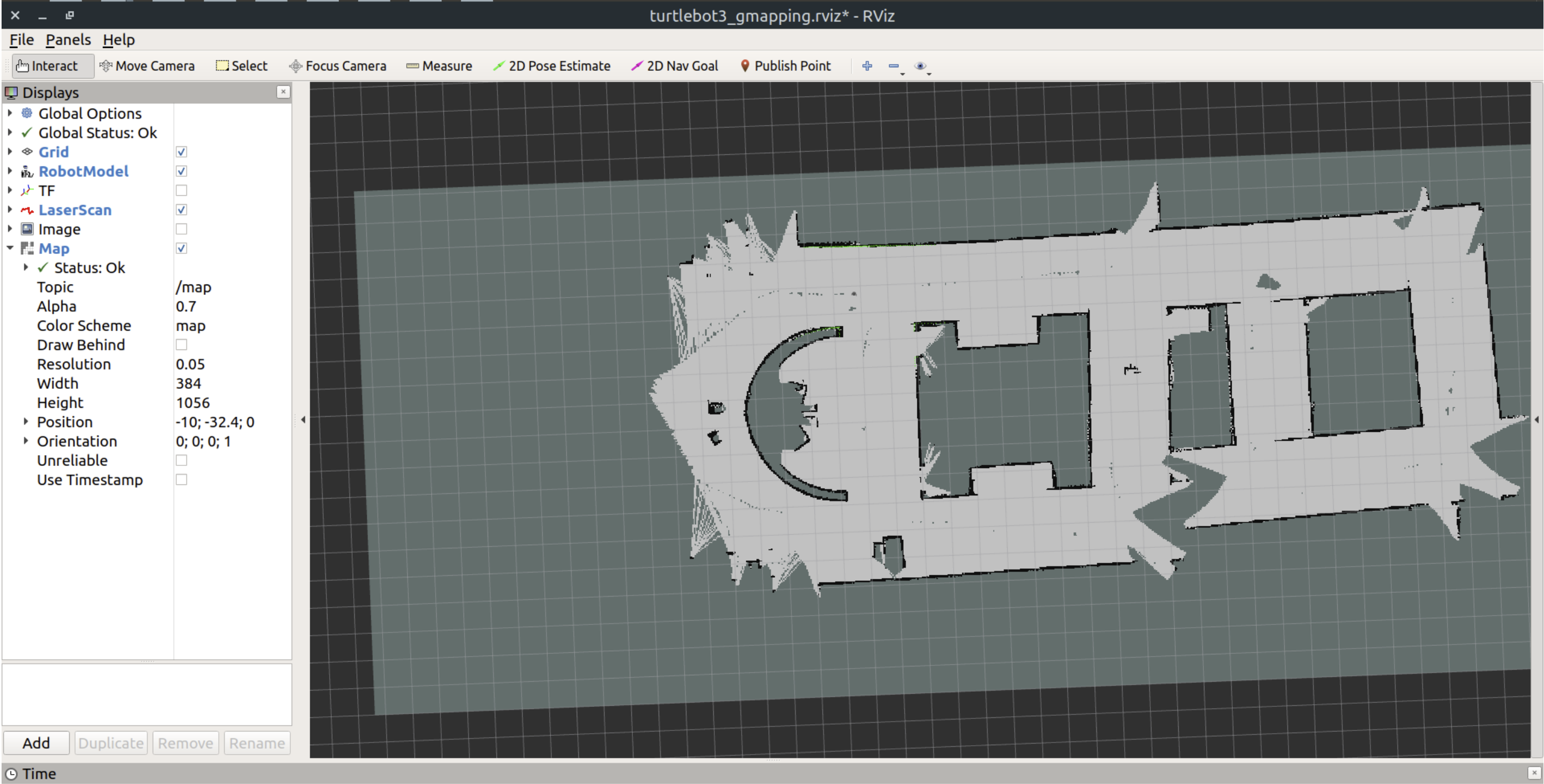
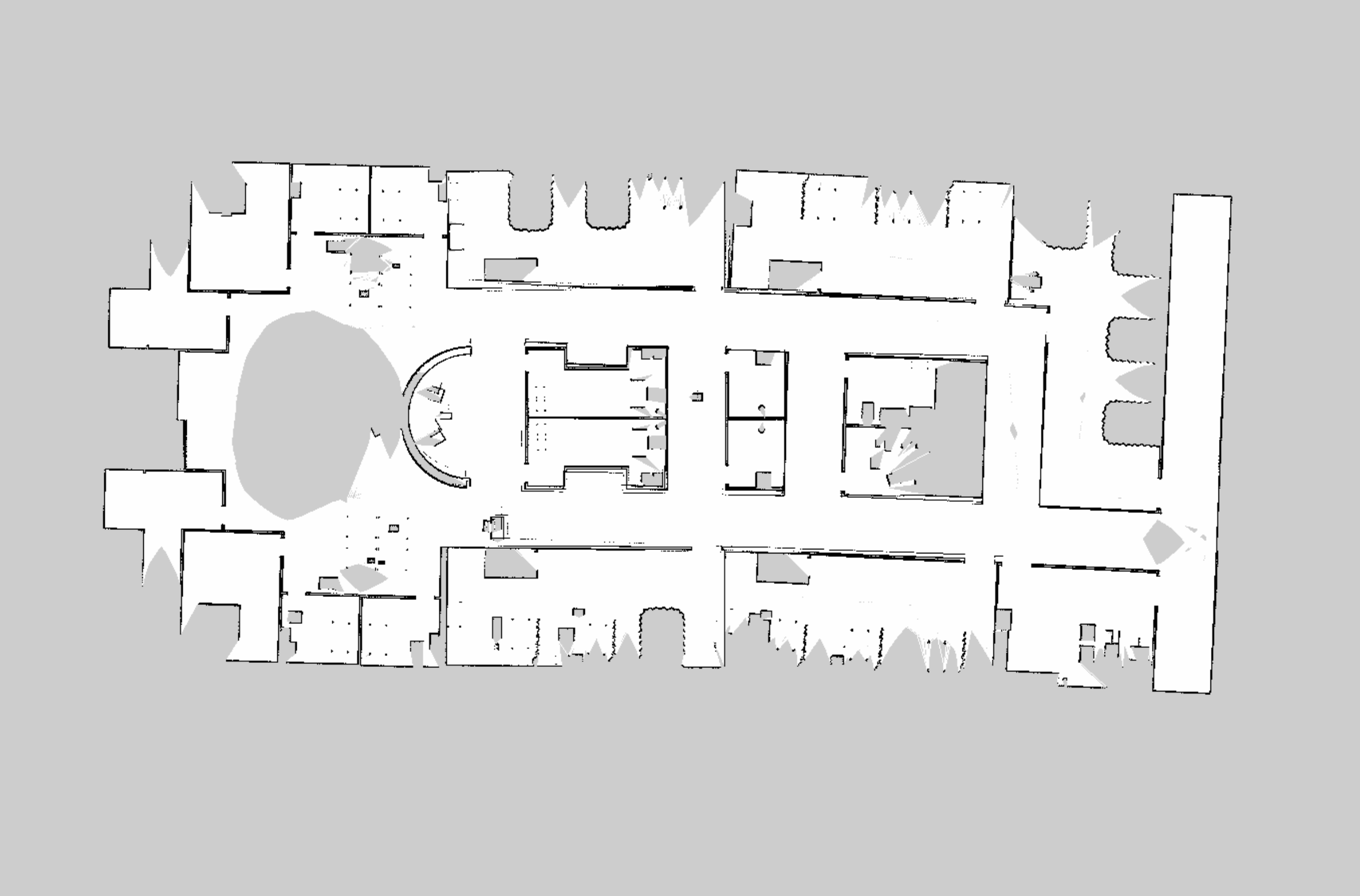
- Tuning gmapping coordinates to optimize map by robot M.
- Interfacing multiple packages together to work seamlessly.
- Using OpenCV image matries with ROS
Outcome:
- Robot M succesfully maps the AWS Hospital World with sufficient accuracy to visit POIs and lead visiting robot S to POIs.
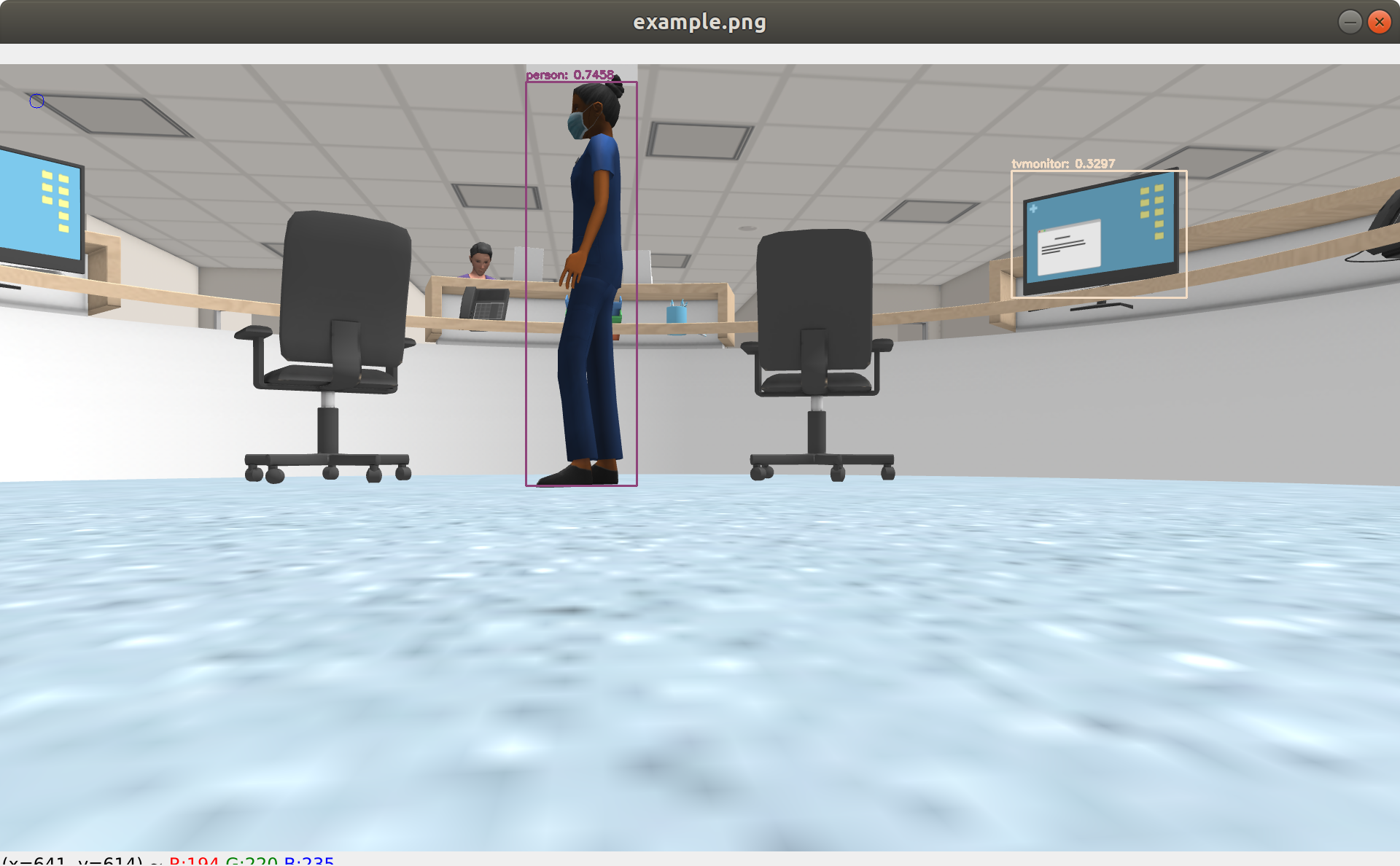
- Implement a trained computer vision classifier on robot M as a bonus task.
Skills Learned and Individual Contributions:
- ROS tools and packages
- AWS resources
- Integrating available software packages together and with original code.
- Implementing computer vision packages with ROS/Gazebo.
- Mapping and tuning mapping parameters
- Coordinate transformation and POI rosparam storage